登录
记住用户名密码

用2个自攻螺丝把舵机固定到‘手机夹左支架’上面,如下图:
从正面看看,

下面开始弄万能手机夹,先把里面的一层透明塑料板拆下来,透明塑料板后面要用到,别扔了。
把一侧的2片可活动塑料片调整一下位置,下方的一片将会固定到‘手机夹右支架’上。
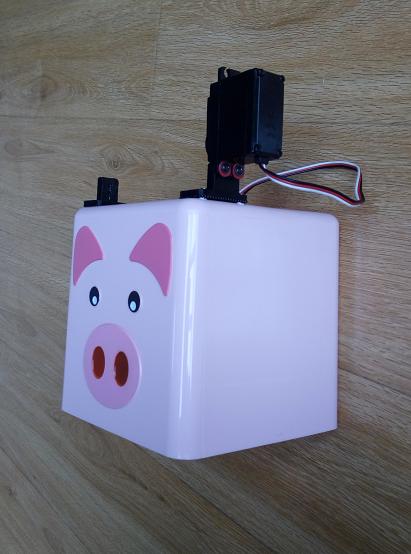
将3D打印件--‘手机夹联轴器’ 插到手机夹的凹槽处,如下图所示:


注意,舵机配带的一字摆臂是事先用自攻螺丝 固定到‘手机夹联轴器’上,这个一字摆臂是将要插到舵机的转轴上的。

准备将手机夹安放到 左右2个支架上去。一边是:一字摆臂插到舵机的转轴上。
另一边是:用2个自攻螺丝将‘手机夹右支架’和手机夹的下方可活动塑料片 紧紧固定。

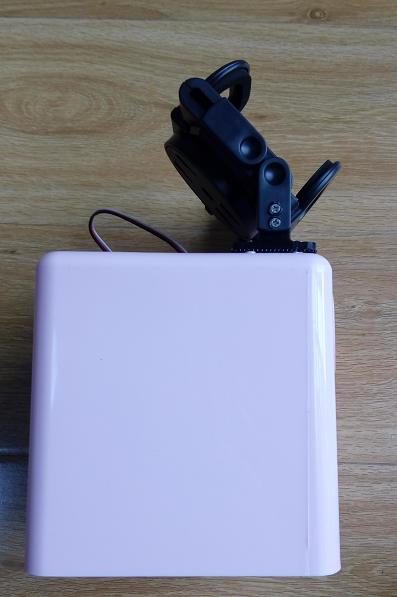
到此,盒子部分就准备好了。下面开始弄底盖部分。
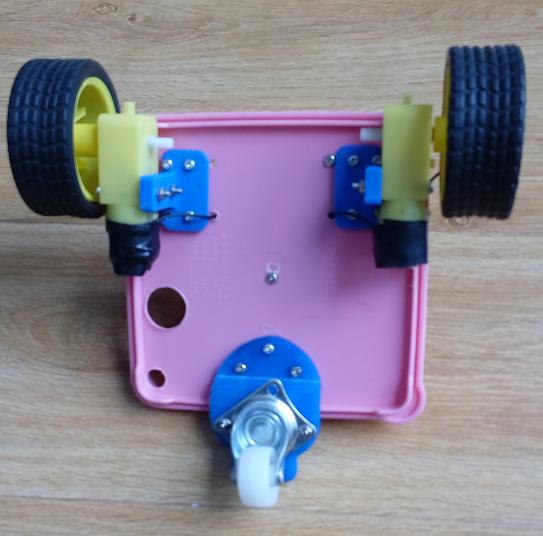
用M3x25mm的长螺丝 将2个3D打印件‘底盘车轮支架’固定到底盖。
然后把3D打印件‘底盘万向轮支架’也固定到底盖。


反面看是这样的:

用电钻在底盖上钻2个孔:
一个直径20mm, 用于装开关;
另一个直径9mm,用于装充电接口;

然后用M3x30mm的长螺丝把2个车轮(带电机)安装到‘底盘车轮支架’上,两对电机线4根从底盖穿孔引到里面去;
用M3x8mm的螺丝把万向轮安装到‘底盘万向轮支架’上。
Originally posted 2016-08-12 22:59:28.








目前有 0 条留言 其中:访客:0 条, 博主:0 条