登录
记住用户名密码


机器人演示视频:
相关资源下载
1)Arduino源程序:http://ykz.e2eye.com/rob3dfiles/wl_rob_arduino_src.zip
2)Android大脑的源程序:http://ykz.e2eye.com/rob3dfiles/wl_rob_android_src.zip
3)安卓大脑的apk安装包:http://ykz.e2eye.com/rob3dfiles/MobileCamera.apk
4)3D打印STL文件:http://ykz.e2eye.com/rob3dfiles/all_stl.rar
5)3D打印设计源文件:http://ykz.e2eye.com/rob3dfiles/all_prt.rar
6)机器人的DIY扩展功能:http://www.wangling-tech.com/bbs/forum.php?mod=forumdisplay&fid=44
原理介绍:
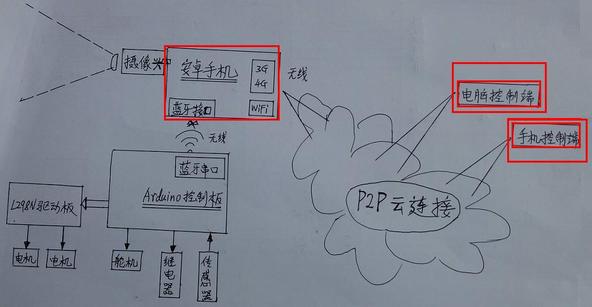
网灵机器人采用闲置的安卓旧手机作为机器人的大脑。
这不仅是废物利用的环保理念,而且通过充分利用安卓手机的强大计算能力和硬件资源,让网灵机器人的功能更加有亮点:
1)无需外接USB摄像头,直接利用安卓手机的高清摄像头,并通过手机强劲的GPU进行视频H.264压缩编码,以便网络传输。
2)利用安卓手机的联网能力,wifi、3G、4G都可以联网。并且集成了网灵的P2P云连接功能,从世界任何地方都可以连接机器人。
3)利用手机计算能力,实现语音识别,用自然语音控制机器人动作。
4)利用手机计算能力,基于OpenCV软件库,实现手势分析和人脸追踪。
除了作为大脑的安卓手机外,网灵机器人还采用了Arduino单片机,用于控制电机舵机和连接传感器模块。
作为大脑的安卓手机 与 Arduino单片机是通过蓝牙串口(例如市面上常见的HC-06)进行通信的,其通信协议很简单,是基于字符串格式的,Arduino向安卓手机周期性发送传感器读数,安卓手机向Arduino发送控制命令。
网灵机器人的显著特点是:可以用手机控制端和电脑控制端从异地远程遥控机器人,并实时观看摄像头图像。这个功能的实现是基于网灵的P2P云连接平台,这是 网灵多年来积累的底层核心技术。只要机器人接入网络,就可以从世界上的任何角落连接到机器人,无需设置路由器端口,无需做动态域名映射,完全自动穿透 NAT内网。
网灵机器人的控制端软件就是 网灵云控制, 它相当于一个“带视频回传的远程遥控手柄”,有一些手柄按键和2个虚拟摇杆,其UI界面是这样的:


机器人手势识别和人脸追踪是基于OpenCV开发的,源程序在Android代码的jni目录,只是搭了一个框架,抛砖引玉,欢迎创客们改进和扩展。。。
原材料和组件
1)方形卡通宠物外观的纸巾盒 1个(淘宝上有售)
2)万能手机夹 1个(淘宝上有售)
3)网灵机器人3D打印件 1套
4)Arduino控制板 + 蓝牙小板 1块
5)L298N电机驱动模块 1块
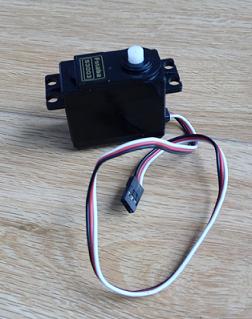
6)标准舵机 1个
7)电池电压传感器模块 1个
8)可充电锂电池 1块
9)65mm轮子 + 电机(转速不要太快,大概为50转每分钟) 2套
10)一寸万向轮 1个
11)开关 1个
12)M3x30mm 长螺丝 4根,M3x25mm螺丝若干,M3x8mm螺丝若干,自攻螺丝若干,铜柱长螺丝 2根,M3螺母若干
13)杜邦线若干,导电线若干




工具
电烙铁,电钻,502胶,电胶布,钳子,改锥,小刀
组装步骤
首先,将纸巾盒的上下两部分揭开,分为上面的盒子和下面的底盖,先用盒子。
将3D打印件--手机夹左支架 和 手机夹右支架 用自攻螺丝固定到盒子上,如下图,注意左右支架都要固定到盒子的最边缘,否则后面步骤将没有足够的宽度放置手机夹。

准备好标准舵机,尺寸 40.7*19.7*42.9mm
Originally posted 2016-08-12 22:59:28.








目前有 0 条留言 其中:访客:0 条, 博主:0 条